Modeling functionalities of the brain in human-robot interaction contexts requires a real-time understanding of how each part of a robot (motors, sensors, emotions, etc.) works and how they interact all together to accomplish complex behavioural tasks while interacting with the environment. Human brains are very efficient as they process information using event-based impulses also known as spikes, which make living creatures very efficient and able to outperform current mainstream robotic systems in almost every task that requires real-time interaction. In recent years, combined efforts by neuroscientists, biologists, computer scientists and engineers have made it possible to design biologically realistic hardware and models that can endow the robots with the required human-like processing capability based on neuromorphic computing and Spiking Neural Network (SNN). However, while some attempts have been made, a comprehensive combination of neuromorphic computing and robotics is still missing. In this blog, we present our analysis of a systematic review of neuromorphic computing applications for socially interactive robotics.
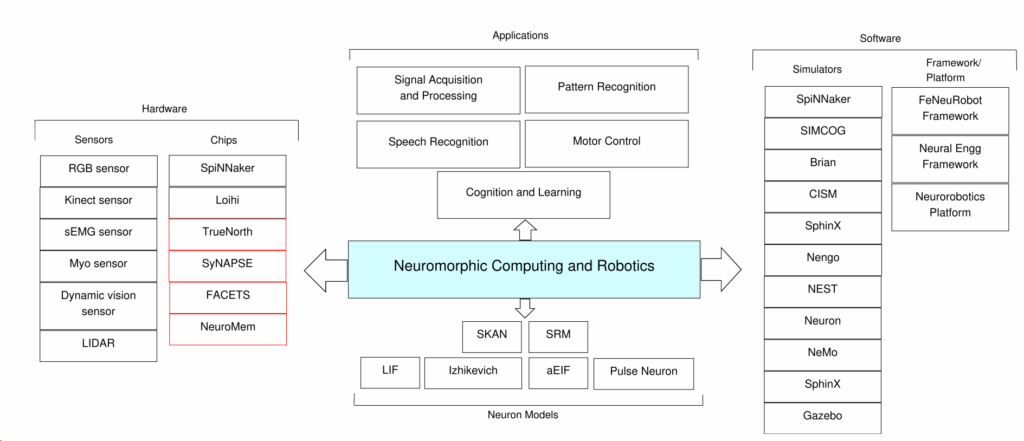
An overview figure of the landscape of neuromorphic computing and robotics. It shows major hardware, software, neuron models and applications. The red boxes in chips column shows that they are not used in robotic applications yet.
After critically analyzing the literature in this field, here are the shortcomings that can be considered for future research.
Humanoid Robots: Research in neuromorphic computing for robotics has primarily focused on basic cognitive tasks, such as navigation and memory storage, with limited human-robot interaction in social contexts. There’s a notable absence of experiments involving humanoid robots interacting with humans, indicating a gap in research aimed at enhancing social interaction capabilities.
Neuromorphic Chips: The majority of studies reviewed use only two types of neuromorphic chips, with Intel’s Loihi chip being applied to memory improvement and spatial mapping, and the SpiNNaker architecture focusing on behavioral learning and visual attention. The lack of experiments integrating neuromorphic chips with humanoid robots for real-time decision-making presents an opportunity for further exploration.
Hardware: Many experiments utilize non-spiking sensors, which are less efficient than neuromorphic hardware. The transition to neuromorphic sensors could enhance processing speed and energy efficiency, crucial for social robotics.
Personalization: The field faces challenges in personalizing robots, a task that requires interdisciplinary collaboration. The gap between simplified brain models used by roboticists and the more complex models studied by neuroscientists needs bridging to enable real-time simulations and applications in the real world.
Generalized Framework: There is an absence of a general-purpose framework for training and modeling in social neurorobotics. Current algorithms for converting Artificial Neural Networks (ANNs) to Spiking Neural Networks (SNNs) lack accuracy and efficiency, highlighting the need for advancements in conversion algorithms and specialized mechanisms for evaluating SNN model performance.
Ethics: Ethical considerations, such as trust, safety, and data privacy, have been largely overlooked. As the field is still in its infancy, there is a critical need for proactive research to ensure the ethical, desirable, and socially acceptable development of social neurorobotics.
The findings indicate that while there’s a focus on improving existing techniques for specific applications, comprehensive integration to develop fully capable systems is lacking. Few studies showcase real-world social interaction between humans and robots, often limited to closed-loop interactions. A significant challenge identified is the absence of universal training methods and conversion mechanisms for neuromorphic models, which hinders the development of human-like social interactions in robots. The article concludes by highlighting the need for more interdisciplinary efforts, particularly between roboticists and neuroscientists, to bridge neuromorphic computing with social robotics fully.
For complete paper: Neuromorphic Computing for Interactive Robotics: A Systematic Review | IEEE Journals & Magazine | IEEE Xplore